Motor bước và bộ điều khiển
Nội dung bài xích viết
1/ Động cơ cách là gì?2/ Phân loại hộp động cơ bước4/ những thiết bị đi kèm theo với hộp động cơ bước
Lựa chọn hộp động cơ bước
Lựa chọn hộp động cơ bước, bộ động cơ servo, bộ động cơ hybrid và một số trong những số phụ khiếu nại đi kèm: Driver điều khiển, phanh từ hay hộp tụt giảm cho động cơ bước ⇒ Xem những loại hộp động cơ
1/ Động cơ bước là gì?
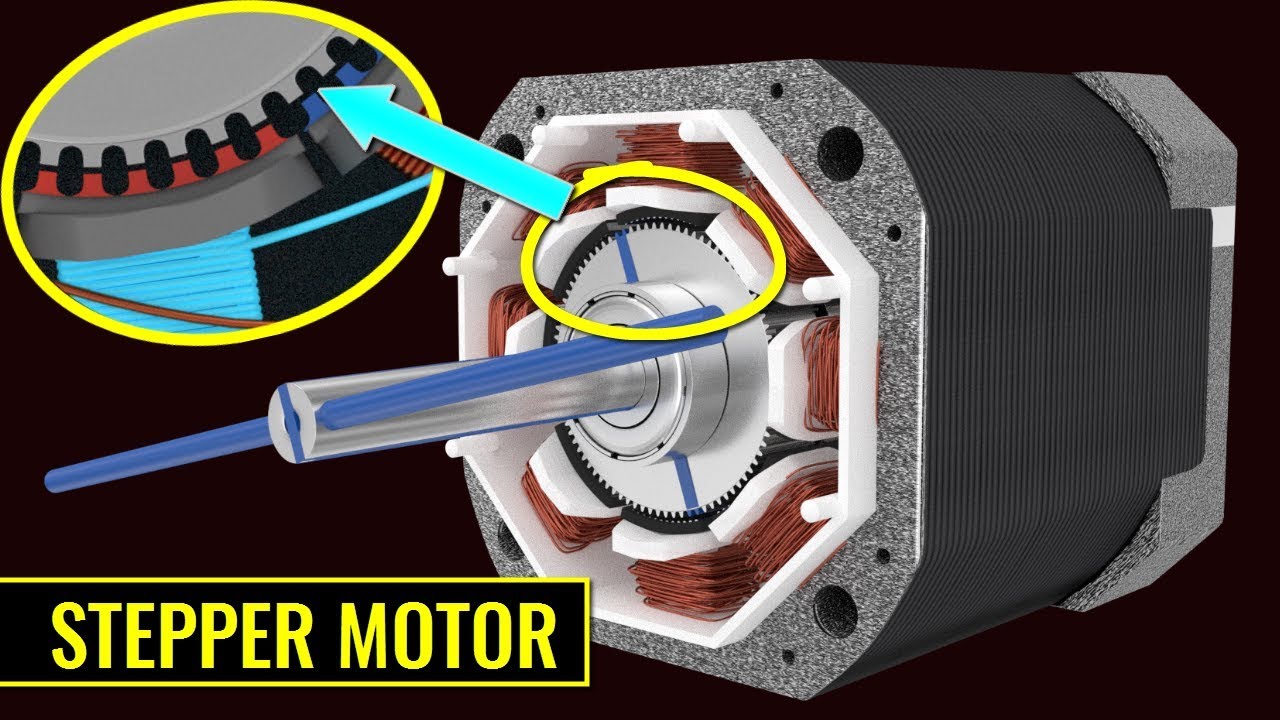
Động cơ cách (stepper motor), thực chất là một động cơ đồng điệu dùng để biến đổi các tín hiệu điều khiển dưới dạng các xung điện rời rạc tiếp nối nhau thành các chuyển động góc quay.
Bạn đang xem: Motor bước và bộ điều khiển

1.1/ cấu tạo động cơ bước
Về cấu tạo động cơ cách gồm có các bộ phận là stato, roto là nam châm từ vĩnh cửu hoặc vào trường hòa hợp của động cơ biến đổi từ trở là mọi khối răng có tác dụng bằng vật liệu nhẹ tất cả từ tính. Động cơ cách được điều khiển bởi bộ tinh chỉnh và điều khiển bên ngoài. Động cơ bước và cỗ điều khiển được thiết kế theo phong cách sao mang lại động cơ có thể giữ nguyên ngẫu nhiên vị trí cố định và thắt chặt nào tương tự như quay mang đến một vị trí bất kỳ nào.
Động cơ bước rất có thể sử dụng trong hệ thống điều khiển vòng hở 1-1 giản, hoặc vòng kín, mặc dù khi thực hiện động cơ cách trong hệ tinh chỉnh vòng hở lúc quá tải, vớ cá những giá trị của hộp động cơ đều bị mất và hệ thống cần nhận diện lại.
1.2/ Đặc điểm của động cơ bước
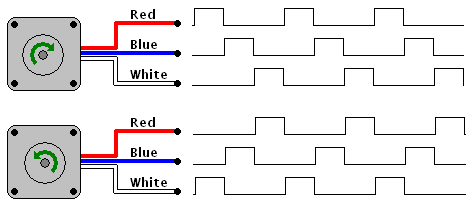
Động cơ bước vận động dưới tác dụng của những xung rời rộc rạc và tiếp nối nhau. Khi có dòng điện hay điện áp để vào cuộn dây phần ứng của hộp động cơ bước làm cho roto của hộp động cơ quay một góc độc nhất vô nhị định call là cách của động cơ.Góc bước là góc xoay của trục rượu cồn cơ khớp ứng với một xung điều khiển. Góc cách được xác minh dựa vào cấu trúc của động cơ bước và phương thức điều khiển bộ động cơ bước.Tính năng mở máy của bộ động cơ được đặc thù bởi tần số xung rất đại hoàn toàn có thể mở máy mà không tạo cho roto mất đồng bộ.Chiều quay hộp động cơ bước không nhờ vào vào chiều dòng điện mà phụ thuộc vào vào đồ vật tự cấp xung cho những cuộn dây.2/ Phân loại hộp động cơ bước
Động cơ cách được chia thành 3 loại thiết yếu là:
Động cơ bước phát triển thành từ trở.Động cơ bước nam châm từ vĩnh cửuĐộng cơ bước hỗn hợp/lai.2.1/ Động cơ bước nam châm hút vĩnh cửu
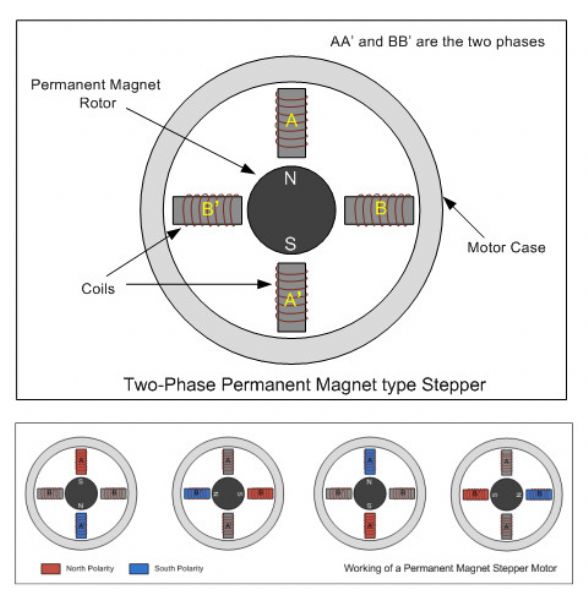
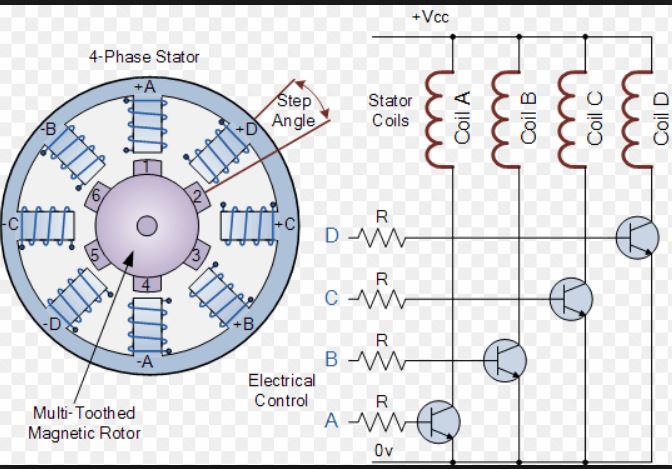
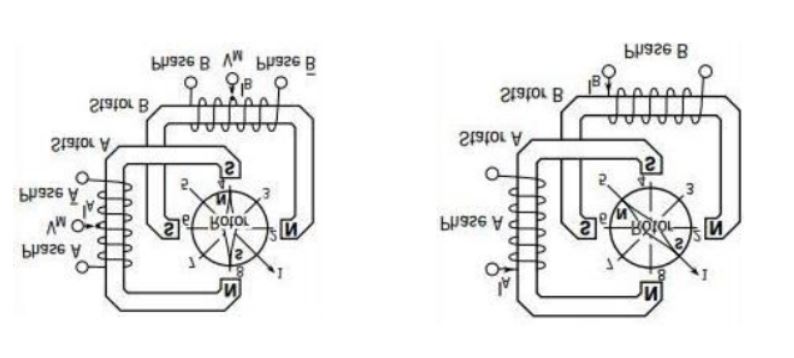
Động cơ bước nam châm từ vĩnh cửu có roto là nam châm vĩnh cửu, stato có khá nhiều răng trên từng răng gồm quấn các vòng dây. Các cuộn dây pha có cực tính không giống nhau.
Nguyên lý hoạt động vui chơi của động cơ bước nam châm hút vĩnh cửu gồm 2 cặp cuộn pha được trình diễn ở hình: thuở đầu vị trí của stato với roto vẫn ở phase A. Khi cấp điện đến 2 cuộn dây pha B và D vào 2 cuộn sẽ lộ diện cực tính. Do cực tính của cuộn dây pha với roto ngược nhau dẫn cho roto vận động đến vị trí như hình phase B on. Lúc cuộn dây pha B cùng D ngắt điện cuộn dây A và B được cấp cho điện thì roto lại vận động đến địa điểm như hình phase C on.
Gọi số răng bên trên stato là Zs, góc bước của động cơ là Sđc, góc bước của hộp động cơ này được tính theo công thức sau:
2.2/ Động cơ bước trở nên từ trở
Động cơ bước trở thành từ trở có kết cấu giống với bộ động cơ bước nam châm từ vĩnh cửu. Cấu trúc của stato cũng đều có các cuộn pha đối xứng nhau, nhưng những cuộn trộn đối xứng gồm cùng cực tính không giống với bộ động cơ bước nam châm hút từ vĩnh cửu. Góc bước của stato là Ss.
Roto của động cơ bước biến từ trở được cấu trúc từ thép non có chức năng dẫn trường đoản cú cao, do đó khi hộp động cơ mất năng lượng điện roto vẫn liên tục quay thoải mái rồi mới dừng hẳn.
Nguyên lý hoạt động của động cơ bước biến từ được miêu tả như hình:
Khi cấp điện mang đến pha A (hình a), từng cặp cuộn dây A bố trí đối xứng nhau tất cả cùng rất tính là nam giới (S) với bắc (N). Từ bây giờ các cuộn dây hình thành các vòng trường đoản cú đối xứng.
Khi cung cấp điện mang lại pha B (hình b). Lúc này từ trở trong hộp động cơ lớn, momen từ ảnh hưởng tác động lên trục roto tạo cho roto quay theo chiều bớt từ trở. Roto quay cho tới khi trường đoản cú trở nhỏ tuổi nhất và khi momen bằng không thì trục hộp động cơ dừng, roto đạt mang đến vị trí cân bằng mới.
Tương từ như thứ khi cung cấp điện cho pha C, động cơ vận động theo cách thức trên với roto tại đoạn như hình c. Quá trình trên tái diễn và bộ động cơ quay liên tục theo máy tự trộn A B C. Để động cơ quay ngược chiều chỉ cần cấp điện cho những pha theo máy tự ngược lại.
Xem thêm: Iphone Lock Không Cần Sim Ghép, Iphone Lock Không Cần Dùng Sim Ghép
Gọi số trộn của bộ động cơ là Np, ổ răng bên trên roto là Zr, góc cách của hộp động cơ bước thay đổi từ trở là S ta tính được cách làm sau:
2.3/ Động cơ bước hỗn hợp
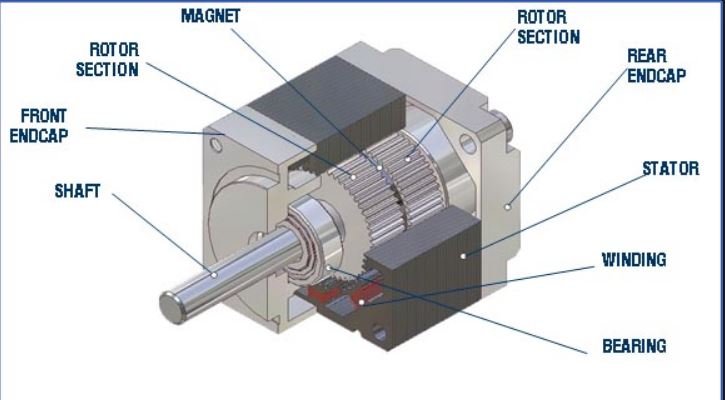
Động cơ cách hỗn thích hợp (còn điện thoại tư vấn là đụng ơ cách lai) gồm đặc trưng kết cấu của hộp động cơ bước nam châm hút vĩnh cửu và hộp động cơ bước biến hóa từ. Stato cùng roto có cấu tạo tương tự động cơ bước biến chuyển từ trở dẫu vậy số răng của stato với roto không bởi nhau. Roto của bộ động cơ bước thông thường sẽ có 2 phần: bên trong là nam châm từ vĩnh cửu được đính thêm chặt lên trục động cơ, phần quanh đó là 2 đoạn roto được sản xuất từ lá thép non cùng răng của 2 đoạn roto được đặt lệch nhau.
Góc cách của hộp động cơ bước hỗn hợp được tính theo công thức:
Trong đó:
S là góc bước của cồn cơSr là góc thân 2 răng kề nhauZs là số cặp cực trên stato.Động cơ cách hỗn thích hợp được sử dụng thoáng rộng vì phối hợp các điểm mạnh của 2 loại động cơ trên là hộp động cơ bước nam châm vĩnh cửu và động cơ bước trở nên từ trở.
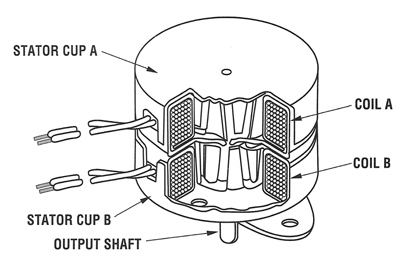
2.3/ Động cơ cách 2 pha
Hiện nay những động cơ cách 2 pha được thực hiện rất thông dụng, gồm kết cấu như động cơ bước tất cả hổn hợp và hộp động cơ bước nam châm hút vĩnh cửu. Mặc dù động cơ cách 2 trộn còn được phân loại phụ thuộc cách đấu dây những cặp cực.
Động cơ bước 1-1 cực: cuộn dây pha có bố dây đầu ra. Điểm trung trọng điểm của cuộn dây được đấu ra ngoài. Khi cấp cho điện, dây trung chổ chính giữa được nối với đầu dương của mối cung cấp điện, nhì đầu dây còn sót lại được nối với đầu âm.
Động cơ bước lưỡng cực: cuộn dây pha của loại động cơ này chỉ tất cả 2 đầu ra. Một đầu dây được nối với nguồn dương cùng đầu còn lại được nối với đầu âm của nguồn điện. Động cơ cách lưỡng cực có kết cấu dễ dàng và đơn giản nhưng điều khiển phức hợp hơn động cơ bước đối chọi cực.
3/ phương thức điều khiển hộp động cơ bước
Hiện nay gồm 4 phương pháp điều khiển động cơ bước.
4/ các thiết bị kèm theo với bộ động cơ bước
4.1/ Hộp giảm tốc
Hộp giảm tốc sử dụng cho động cơ bước là các loại hệ bánh rang hành tinh. Bảo đảm an toàn độ đúng đắn và bền, tỉ lệ giảm tốc: 1:5, 1:10. Hộp tụt giảm được chế tạo phù hợp theo từng loại động cơ 86, 57, 42 thường được sử dụng trong robot hoặc những loại vật dụng gia công

4.2/ Phanh từ
Phanh tự là lắp thêm được lắp tại phần đuôi hộp động cơ bước, đó là thiết bị được dùng để làm dừng đụng cơ bất ngờ đột ngột hoặc tự giữ trong trường thích hợp mất điện.

4.3/ Encoder
Đây là một trong thiết bị được gắng ở chỗ đuôi động cơ cơ, có tính năng hồi tiếp biểu thị về driver điều khiển. Từ kia driver sẽ cấp đúng số xung. Loại bộ động cơ được nắm encoder sẽ vận động với tốc độ cao, chính xác và không bị mất bước trong quy trình hoạt động
Loại động cơ step được thế encoder hay được điện thoại tư vấn tên là bộ động cơ hybrid (động cơ lai). để tinh chỉnh và điều khiển động cơ này cũng rất cần phải sử dụng driver đơn nhất (có những cổng nhận biểu đạt hồi tiếp encoder)











